Fraunhofer IOF researchers develop goSCOUT3D handheld scanner
Enables 3D analysis of objects; scanner has been connected to Boston Dynamics "robot dog".
15 April 2024 Photonics Applications News
 With its new handheld scanner goSCOUT3D, Fraunhofer IOF ("IOF") researchers have developed a mobile sensor, which they say "enables high-resolution 3D measurements of complex objects". To further automate this process, researchers have now connected the scanner to a robot dog made by Boston Dynamics.
With its new handheld scanner goSCOUT3D, Fraunhofer IOF ("IOF") researchers have developed a mobile sensor, which they say "enables high-resolution 3D measurements of complex objects". To further automate this process, researchers have now connected the scanner to a robot dog made by Boston Dynamics.
The unit consisting of sensor head and robot will now be presented for the first time at the Control trade fair in Stuttgart, Germany, from April 23rd-26th.
This "helper" works according to strict human instruction and thereby makes the day-to-day work easier for its two-legged colleagues, say its IOF developers. Except that in this case, the commands primarily apply to tasks for high-precision 3D documentation.
3D digitization with robot dog 'Spot'
Be it for the servicing of complex components such as aircraft engines, or for quality control in the automotive industry, virtual 3D models enable the precise documentation of large machines and their small details. For this purpose, researchers at IOF have already developed the mobile handheld scanner goSCOUT3D in the past year. It enables 2D and 3D digitization of complex objects with a volume of several cubic meters, at a particularly high spatial resolution of less than 0.25 mm.
Until now, to create these so-called "digital twins", the scanner had to be moved manually by human operators around the object to be measured. Operators were required to carry out the measurement with great precision, to guide the sensor head at a constant speed and to maintain a largely constant measuring distance. Potential signs of fatigue or incomplete measurement data were the result at times.
Researchers from the department of Imaging and Sensing at Fraunhofer IOF have addressed this problem from the shop floor and searched for a way to make the measurements more comfortable for humans, and at the same time making the operational process more efficient.
 "Integrating the sensor head, which was recently developed in Jena, with Spot, will automate the measuring process of the goSCOUT3D scanner in future and eliminate the need for constant human supervision", said Dr. Andreas Breitbarth, head of Image Processing and Artificial Intelligence at Fraunhofer IOF. "The robot dog can autonomously maneuver goSCOUT3D through measuring scenarios at consistent measuring speed and distance".
"Integrating the sensor head, which was recently developed in Jena, with Spot, will automate the measuring process of the goSCOUT3D scanner in future and eliminate the need for constant human supervision", said Dr. Andreas Breitbarth, head of Image Processing and Artificial Intelligence at Fraunhofer IOF. "The robot dog can autonomously maneuver goSCOUT3D through measuring scenarios at consistent measuring speed and distance".
Compared to conventional measuring robots employed along production lines and ordinarily permanently mounted in place, the autonomous walking robot can move around freely. Its agility on diverse surfaces means the measurement object can be recorded in full, from every side as well as on various levels, such as below a guide rail.
Consistent scan speed and reduced handling variability furthermore ensure greater reproducibility of results and decrease the measurement time through fewer redundancies. That makes the integrated measuring unit particularly interesting for application in serial manufacturing processes or quality control.
Autonomous measuring
To achieve these application goals, a reliable coordination between the robot and 3D sensor is necessary. So, a hand-eye-calibration is used to connect the 3D sensor to the robot's coordinate system. As soon as the walking robot is calibrated to the scanner in this way, it can be programmed by human experts to measure predefined objects.
"Before the actual measuring process, speed, precise measuring location, and other important parameters are submitted by a human operator to Spot, so that the robot dog can conduct the scans the same way as a human being, without the need for them to be physically present", said Breitbarth.

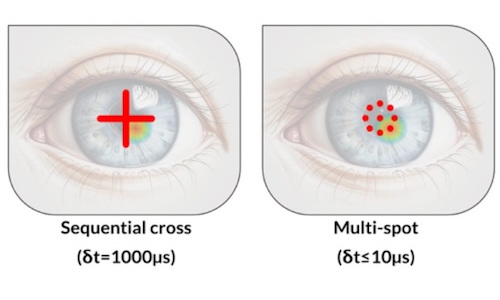
Multi-spot OCT tracks cornea deformations
July 29 2026


Gooch & Housego poised for private equity buyout
July 29 2026